The Ultimate ROS1 Guide to Laser Filters
09 Jan 2022This article is still a work in progress, come back at the end of March 2022 to check it out :)
Table of Contents
- Table of Contents
- Introduction
- Types of laser filters
- LaserScanIntensityFilter
- LaserScanRangeFilter
- LaserScanAngularBoundsFilter
- LaserScanAngularBoundsFilterInPlace
- LaserScanSectorFilter
- InterpolationFilter
- LaserScanFootprintFilter
- LaserScanBoxFilter
- LaserScanPolygonFilter
- LaserScanMaskFilter
- ScanShadowsFilter
- ScanBlobFilter
- LaserScanSpeckleFilter
- pass_through filter
- Afterthoughts
- Notes
- References
Introduction
Today, I want to help illuminate the filtering algoritms used in the laser_filters package through pseudocode, demonstrating their use cases and through visual diagrams. I also hope to fill in some gaps that have been left by existing documentation on ROS Wiki.
This is written especially for ROS Beginners(and might not understand C++ as well), as well as for those who are simply interested but too busy to read the source code. By the way, if you haven’t read the documentation, it will be immensely useful. Although it hasn’t been updated to include new filters from the latest branch.
When I was starting out in ROS, I wondered how ROS developers wrote their own algorithms for filtering lidar noise, or getting the specific data points they desire. And the open source community already had an answer to that, the ros-perception laser_filters package is already an essential tool that relieves every other ROS developer out there from having to develop their own lidar processing code.
However, it’s a pity that for such an awesome piece of work, there is insufficient documentation and material out there explaining how these algorithms work. Of course most experienced developers would say, “Read the source code! It’s really obvious.” But we fail to see that engineers can be too busy to deep dive into the code even if the code is well organized and written (which it just so happens often).
Types of laser filters
Laser scans encode 2 primary types of data, the range of each laser beam and it’s reflected intensity. By comparing the ranges between different laser beams we can also remove “noisy” laser beams. We can also convert the laser scans to it’s corresponding (x, y) position relative to the robot (or obtain their angular position) and filter out points in undesired locations, with the possibility to also invert this operation. The types of manipulation performed on the laser scan ranges could be setting their value to NaN, Infinity or a user-defined value.
In the following pseudocode, the Update Function is the main function that manipulates laser scans within each laser filter.
LaserScanIntensityFilter
This filter removes all measurements from the sensor_msgs/LaserScan which have an intensity greater than upper_threshold or less than lower_threshold. These points are “removed” by setting the corresponding range value to range_max + 1, which is assumed to be an error case.
Take note that setting filter_override_intensity to true will assign all “removed” points the intensity of 0.0, and all non-“removed” points to have an intensity value of 1.0 .
Use Cases
The intensity filter could be used to extract laser scan points within a range of intensities especially for applications in robot docking, or even SLAM. Some docking stations possess reflective markers which the lidar will perceive as high intensity scan points, which when extracted and processed could provide an indication of the angular and linear offset of the robot relative to the docking station.
Parameters
- name: intensity
type: laser_filters/LaserScanIntensityFilter
params:
lower_threshold: 8000
upper_threshold: 100000
invert: false
filter_override_range: true #If true, set all "removed" points to NaN
filter_override_intensity: false #If true, set all "removed" points to have intensity of 0.0, and set all non-"removed" points to have intensity of 1.0
Pseudocode
Update Function
FUNCTION Update(scan)
for each i in RANGE (0, scan.ranges.size()) # For each laser scan point
#Intensity and range are modified in place here
intensity = scan.intensities[i]
range = scan.ranges[i]
#Set filter as true if intensity falls outside the user-defined threshold
filter = intensity <= config.LOWER_THRESHOLD OR intensity >= config.UPPER_THRESHOLD
if (config.INVERT) #Invert "removal" of points
filter = not filter
end if
if filter
if config.filter_override_range
range = NaN #Set current range value as NaN
end if
if config.filter_override_intensity
intensity = 0.0
end if
else
if config.filter_override_intensity
intensity = 1.0
end if
end if
end for
ENDFUNCTION
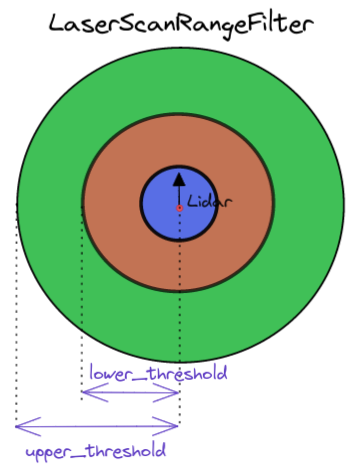
LaserScanRangeFilter
This filter removes all measurements from the sensor_msgs/LaserScan which are greater than upper_threshold or less than lower_threshold.
Use Cases
The range filter could be used to “remove” laser scan points that are below or beyond the usable lidar range (usually defined in the technical datasheet of the lidar). This is important to prevent erroneous readings from being used in the marking/clearing of obstacles from the costmap of the navigation stack.
Parameters
- name: range_filter
type: laser_filters/LaserScanRangeFilter
params:
use_message_range_limits: false # If false, use the threshold specified here, else use the range limits in the scan message
lower_threshold: 0.075 # if not specified defaults to 0.0
upper_threshold: 24.0 # if not specified defaults to 100000.0
lower_replacement_value: .inf # Replacement value for scans below lower_threshold, if not specified defaults to NaN
upper_replacement_value: .inf # Replacement value for scans above upper_threshold, if not specified defaults to NaN
Pseudocode
Update Function
FUNCTION Update(scan_in, scan_out)
lower_threshold = config.lower_threshold
upper_threshold = config.upper_threshold
if (config.use_message_range_limits)
lower_threshold = scan_in.range_min
upper_threshold = scan_in.range_max
end if
scan_out = scan_in #Copy input scans to output scans
for i in range(0, scan_in.ranges.size()) # For each laser scan point
#Assign replacement values for scan ranges outside the specified threshold
if (scan_out.ranges[i] <= lower_threshold)
scan_out.ranges[i] = config.lower_replacement_value
else if (scan_out.ranges[i] >= upper_threshold)
scan_out.ranges[i] = config.upper_replacement_value
end if
end for
ENDFUNCTION
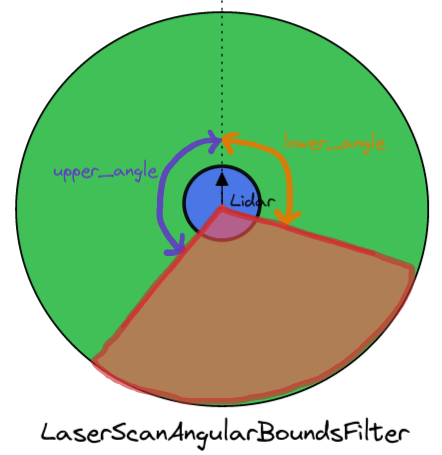
LaserScanAngularBoundsFilter
Removes points in a sensor_msgs/LaserScan OUTSIDE of certain angular bounds by changing the minimum and maximum angle. All angular units are in radians.
Use Cases
The angular bounds filter could be used to remove scan points that might be intersecting with the physical robot base, which are mistaken as obstacles by the navigation stack.
Parameters
- name: angular_bounds
type: laser_filters/LaserScanAngularBoundsFilter
params:
lower_angle: -1.571 #Clockwise from z axis of lidar
upper_angle: 1.571 #Anti-clockwise from z axis of lidar
Pseudocode
Update Function
FUNCTION Update(scan_in, scan_out)
scan_out = scan_in #Copy input scans to output scans
start_angle = scan_in.angle_min
current_angle = scan_in.angle_min
start_time = scan_in.header.stamp
count = 0
for i in range(0, scan_in.ranges.size()) # For each laser scan point
if scan_in.angle_increment > 0 #If lidar turns counter-clockwise
#If starting angle is outside the specified angular bounds, then increment the range index until it is within.
if start_angle < config.lower_angle
start_angle += scan_in.angle_increment
current_angle += scan_in.angle_increment
start_time += scan_in.time_increment
else
scan_out.ranges[count] = scan_in.ranges[i]
#Don't update intensity data if it's not available
if scan_in.intensities.size() > i
scan_out.intensities[count] = scan_in.intensities[i]
end if
count++ #Increment index of scan_out
#Break out of loop if next increment is beyond the upper angular bounds
if current_angle + scan_in.angle_increment > upper_angle
break
end if
current_angle += scan_in.angle_increment
end if
else #Lidar turns clockwise
#If starting angle is outside the specified angular bounds, then increment the range index until it is within.
if start_angle > config.upper_angle
start_angle += scan_in.angle_increment
current_angle += scan_in.angle_increment
start_time += scan_in.time_increment
else
scan_out.ranges[count] = scan_in.ranges[i]
#Don't update intensity data if it's not available
if scan_in.intensities.size() > i
scan_out.intensities[count] = scan_in.intensities[i]
end if
count++ #Increment index of scan_out
#Break out of loop if next increment is beyond the upper angular bounds
if current_angle + scan_in.angle_increment < lower_angle
break
end if
current_angle += scan_in.angle_increment
end if
end if
end for
#Assign the fields for metadata of the scans
scan_out.header.frame_id = scan_in.header.frame_id
scan_out.header.stamp = start_time
scan_out.angle_min = start_angle
scan_out.angle_max = current_angle
scan_out.angle_increment = scan_in.angle_increment
scan_out.time_increment = scan_in.time_increment
scan_out.scan_time = scan_in.scan_time
scan_out.range_min = scan_in.range_min
scan_out.range_max = scan_in.range_max
#Resize output scan to the reduced size after filtering
scan_out.ranges.resize(count)
if(scan_in.intensities.size() >= count)
scan_out.intensities.resize(count)
ENDFUNCTION
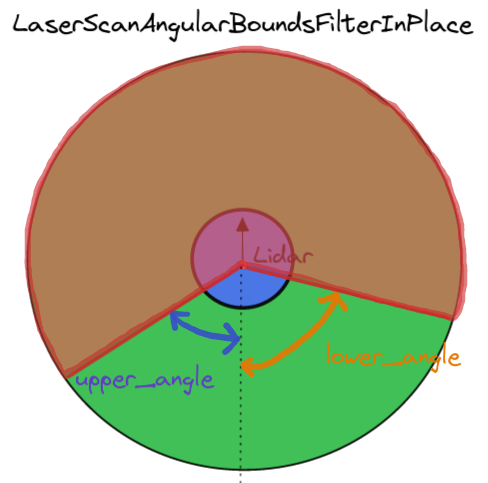
LaserScanAngularBoundsFilterInPlace
Works in a similar way to LaserScanAngularBoundsFilter. It removes points in a sensor_msgs/LaserScan INSIDE certain angular bounds by changing the minimum and maximum angle.
Parameters
- name: angular_bounds
type: laser_filters/LaserScanAngularBoundsFilterInPlace
params:
lower_angle: -1.571 #Clockwise from z axis of lidar
upper_angle: 1.571 #Anti-clockwise from z axis of lidar
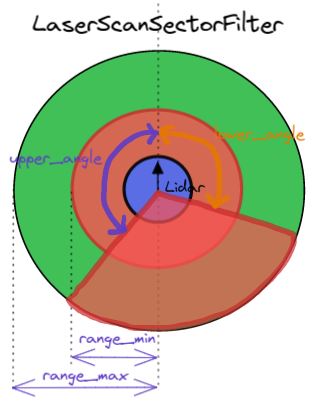
LaserScanSectorFilter
Removes laser scan points within a sector. This would be equivalent to using both LaserScanAngularBoundsFilter and LaserScanRangeFilter together.
Parameters
- name: scan_filter
type: laser_filters/LaserScanSectorFilter
params:
angle_min: 2.54 # if not specified defaults to 0.0
angle_max: -2.54 # if not specified defaults to 0.0
range_min: 0.2 # if not specified defaults to 0.0
range_max: 2.0 # if not specified defaults to 100000.0
clear_inside: true # if not specified defaults to true
invert: false # (!clear_inside) if not specified defaults to false
InterpolationFilter
For any invalid scan range outside of the minimum and maximum scan range, the interpolation comes up with a range value which is an interpolation between the surrounding valid values (within the accepted scan range).
Use Cases
The interpolation filter is sort of a double-edged sword, it could reconstruct scan messages from invalid points. However, it can also introduce erroneous laser points into the scan messages especially if the difference between the surrounding valid range values are relatively large, which is likely for nearby obstacles against other obstacles further away. The navigation stack could mistake this interpolated point as an obstacle when there is none. I would imagine that it’s best used in an environment small enough to be within the maximum range of the lidar.
Parameters
- name: interpolation
type: laser_filters/InterpolationFilter
Pseudocode
Update Function
FUNCTION Update(scan_in, scan_out)
previous_valid_range = scan_in.range_max - 0.01
next_valid_range = scan_in.range_max - 0.01
scan_out = scan_in #Copy input scans to output scans
WHILE i < scan_in.ranges.size() #Iterate through all the scan points
#If scan is outside accepted range
if scan_out.ranges[i] <= scan_in.range_min OR scan_out.ranges[i] >= scan_in.range_max
#Find the next valid range reading
j = i + 1
start_idx = i
end_idx = i
WHILE (j < scan_in.ranges.size())
#If scan is outside accepted range
if (scan_out.ranges[j] <= scan_in.range_min OR scan_out.ranges[j] >= scan_in.range_max)
#Set the end index of the invalid ranges
end_idx = j
else
#Break out of while loop when a valid range is found
next_valid_range = scan_out.ranges[j]
break
end if
j++
ENDWHILE
#Take average of 2 valid range values
average_range = (previous_valid_range + next_valid_range) / 2.0
#Assign averaged value to all invalid ranges between the valid values
for k in range(start_index, end_index)
scan_out.ranges[k] = average_range
end for
#Update previous valid range reading
previous_valid_range = next_valid_range
i = j + 1
else
previous_valid_range = scan_out.ranges[i]
i++
end if
ENDWHILE
ENDFUNCTION
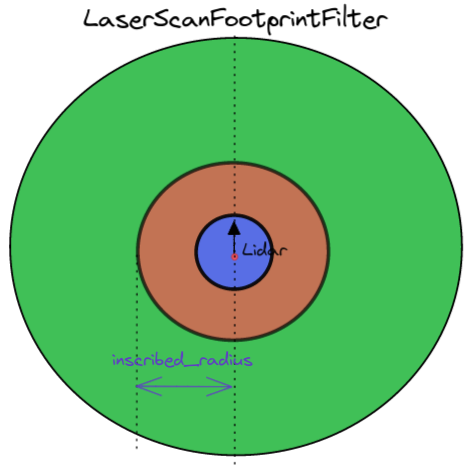
LaserScanFootprintFilter
Removes laser scan points within a prescribed radius of the robot footprint.
Use Cases
The range filter could be used to “remove” laser scan points within the physical robot footprint, especially if the lidar scan points intersect with the robot chassis.
Parameters
- name: footprint_filter
type: laser_filters/LaserScanFootprintFilter
params:
inscribed_radius: 0.75
Pseudocode
The footprint filter is one of those filters that first convert the laser scans to (x, y) cartesian space before “removing” points.
Update Function
FUNCTION Update(scan_in, scan_out)
scan_out = scan_in #Copy input scans to output scans
#Transform input laser scan (scan_in) to point cloud (laser_cloud) with the frame of "base_link"
projector_.transformLaserScanToPointCloud("base_link", scan_in, laser_cloud, tf_) # tf_ here is the tf::TransformListener
#Get the index of the "index" channel which contains an array that matches each scan point to the index of the laser scan, the array can be accessed via scan_cloud.channels[c_idx].values
c_idx = indexChannel(laser_cloud)
#If the "index" channel does not exist or is empty, then ignore scan
if c_idx == -1 OR laser_cloud.channels[c_idx].values.size() == 0
return False
end if
#Iterate through each laser point cloud
for i in range(0, laser_cloud.points.size())
#If point cloud is within the footprint, then "remove" it by setting to NaN
if (inFootprint(laser_cloud.points[i]))
#Obtain the laser scan index that corresponds to the point cloud
index = laser_cloud.channels[c_idx].values[i]
scan_out.ranges[index] = NaN
end if
end for
up_and_running_ = True
ENDFUNCTION
indexChannel Function
FUNCTION indexChannel(scan_cloud)
c_idx = -1
# Iterate through the channels array until an "index" channel is found
for d in range(0, scan_cloud.channels.size())
# This "index" channel contains an array that matches each scan point to the index of the laser scan, the array can be accessed via scan_cloud.channels[c_idx].values
if scan_cloud.channels[d].name == "index"
c_idx = d
break
end if
end for
return c_idx
ENDFUNCTION
inFootprint Function
FUNCTION inFootprint(scan_pt)
#Get flags on whether the individual x or y coordinates are within the footprint radius
x_a = scan_pt.x < -1.0 * config.inscribed_radius
x_b = scan_pt.x > config.inscribed_radius
y_a = scan_pt.y < -1.0 * config.inscribed_radius
y_b = scan_pt.y > config.inscribed_radius
#If the (x,y) point is outside the footprint
if x_a OR x_b OR y_a OR y_b
return False
end if
return True
ENDFUNCTION
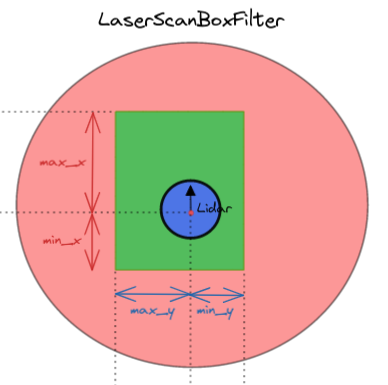
LaserScanBoxFilter
This filter removes points in a sensor_msgs/LaserScan inside of a 3 dimensional cartesian box. These points are “removed” by setting the corresponding range value to NaN which is assumed to be an error case.
Use Cases
The range filter could be used to “remove” laser scan points within the physical robot footprint, especially if the lidar scan points intersect with the robot chassis. It can also be used to only include laser points within a cartesian box, which could be useful for docking, when there is a need to isolate the laser scan points on the docking station of Iterative Closest Point (ICP) scan matching.
Parameters
- name: box_filter
type: laser_filters/LaserScanBoxFilter
params:
box_frame: base_link
max_x: 0.5
max_y: 0.5
max_z: 0.5
min_x: -0.5
min_y: -0.5
min_z: -0.5
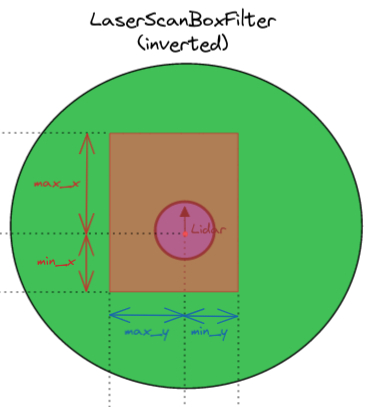
invert: false #sets either the points inside or outside the defined box to be NaN
Pseudocode
Update Function : Updates each laser scan message
FUNCTION Update(scan_in, scan_out)
scan_out = scan_in #Copy input scans to output scans
#Wait for transform from config.box_frame to scan_in frame to be available, using tf_.waitForTransform(...)
#Transform input laser scan (scan_in) to point cloud (laser_cloud), with the point cloud having frame_id of the user-defined box_frame
# tf_ here is the tf::TransformListener
projector_.transformLaserScanToPointCloud(config.box_frame, scan_in, laser_cloud, tf_)
# Obtain field indexes for the point cloud index, x, y and z fields
# They match each scan point to the index of each laser scan
i_idx_c = sensor_msgs::getPointCloud2FieldIndex(laser_cloud, "index")
x_idx_c = sensor_msgs::getPointCloud2FieldIndex(laser_cloud, "x")
y_idx_c = sensor_msgs::getPointCloud2FieldIndex(laser_cloud, "y")
z_idx_c = sensor_msgs::getPointCloud2FieldIndex(laser_cloud, "z")
#Ignore scan if any of the required fields do not exist
if i_idx_c == -1 OR x_idx_c == -1 OR y_idx_c == -1 OR z_idx_c == -1
return False
end if
# Get offset from start of point struct, used as starting index
i_idx_offset = laser_cloud.fields[i_idx_c].offset
x_idx_offset = laser_cloud.fields[x_idx_c].offset
y_idx_offset = laser_cloud.fields[y_idx_c].offset
z_idx_offset = laser_cloud.fields[z_idx_c].offset
pstep = laser_cloud.point_step #Length of a point in bytes
pcount = laser_cloud.width * laser_cloud.height #Number of counts
limit = pstep * pcount #Maximum byte length
#Set starting index to that of the offset
i_idx = i_idx_offset
x_idx = x_idx_offset
y_idx = y_idx_offset
z_idx = z_idx_offset
#Iterate through the points until the end
for x_idx < limit
x = laser_cloud.data[x_idx]
y = laser_cloud.data[y_idx]
z = laser_cloud.data[z_idx]
index = laser_cloud.data[i_idx]
point = tf::Point(x, y, z)
#If not inverting, then simply "remove" points within the 3d cartesian box
#Else "remove" points outside the box
if not config.invert
if inBox(point)
output_scan.ranges[index] = NaN
end if
else
if not inBox(point)
output_scan.ranges[index] = NaN
end if
end if
#Step through to next index
i_idx += pstep
x_idx += pstep
y_idx += pstep
z_idx += pstep
end for
up_and_running_ = True
return True
ENDFUNCTION
inBox Function : Checks if scan point is within 3D cartesian box
FUNCTION inBox(point)
#Flags to indicate if each point coordinate is within the defined box limits
a = point.x < config.max_x
b = point.x > config.min_x
c = point.y < config.max_y
d = point.y > config.min_y
e = point.z < config.max_z
f = point.z > config.min_z
#Return true if within box limits
return a AND b AND c AND d AND e AND f
ENDFUNCTION
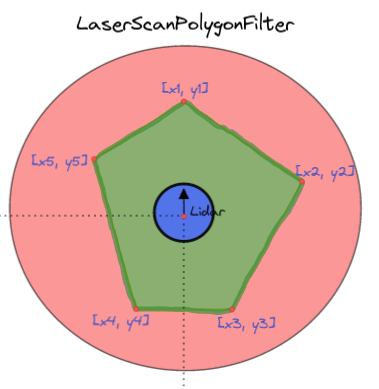
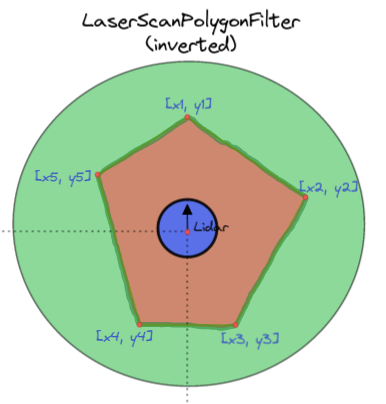
LaserScanPolygonFilter
“Removes” laser scan points within a user-defined polygon using a method similar to LaserScanBoxFilter. The example parameters below define a five sided polygon.
Use Cases
The range filter could be used to “remove” laser scan points within the physical robot footprint (especially if your robot footprint is not circular, in which case you would use the LaserScanFootprintFilter).
Parameters
- name: polygon_filter
type: laser_filters/LaserScanPolygonFilter
params:
polygon_frame: base_link
polygon: [[-1.0, 0.5], [0, 1.0], [1.0, 0.5], [1.0, 0.5], [0.5, -1.0]]
invert: false #sets either the points inside or outside the defined polygon to be NaN
Pseudocode
Update Function
FUNCTION Update(scan_in, scan_out)
#Publish polygon message for visualization
scan_out = scan_in #Copy input scans to output scans
#Wait for transform from config.polygon_frame to scan_in frame to be available, using tf_.waitForTransform(...)
success = tf_.waitForTransform(...)
if not success
return False
end if
#Transform input laser scan (scan_in) to point cloud (laser_cloud), with the point cloud having frame_id of the user-defined polygon_frame
# tf_ here is the tf::TransformListener
projector_.transformLaserScanToPointCloud(config.polygon_frame, scan_in, laser_cloud, tf_)
# Obtain field indexes for the point cloud index, x, y and z fields
# They match each scan point to the index of each laser scan
i_idx_c = sensor_msgs::getPointCloud2FieldIndex(laser_cloud, "index")
x_idx_c = sensor_msgs::getPointCloud2FieldIndex(laser_cloud, "x")
y_idx_c = sensor_msgs::getPointCloud2FieldIndex(laser_cloud, "y")
z_idx_c = sensor_msgs::getPointCloud2FieldIndex(laser_cloud, "z")
#Ignore scan if any of the required fields do not exist
if i_idx_c == -1 OR x_idx_c == -1 OR y_idx_c == -1 OR z_idx_c == -1
return False
end if
# Get offset from start of point struct, used as starting index
i_idx_offset = laser_cloud.fields[i_idx_c].offset
x_idx_offset = laser_cloud.fields[x_idx_c].offset
y_idx_offset = laser_cloud.fields[y_idx_c].offset
z_idx_offset = laser_cloud.fields[z_idx_c].offset
pstep = laser_cloud.point_step #Length of a point in bytes
pcount = laser_cloud.width * laser_cloud.height #Number of counts
limit = pstep * pcount #Maximum byte length
#Set starting index to that of the offset
i_idx = i_idx_offset
x_idx = x_idx_offset
y_idx = y_idx_offset
z_idx = z_idx_offset
#Iterate through the points until the end
for x_idx < limit
x = laser_cloud.data[x_idx]
y = laser_cloud.data[y_idx]
z = laser_cloud.data[z_idx]
index = laser_cloud.data[i_idx]
point = tf::Point(x, y, z)
#If not inverting, then simply "remove" points within the 2d polygon
#Else "remove" points outside the 2d polygon
if not config.invert
if inPolygon(point)
output_scan.ranges[index] = NaN
end if
else
if not inPolygon(point)
output_scan.ranges[index] = NaN
end if
end if
#Step through to next index
i_idx += pstep
x_idx += pstep
y_idx += pstep
z_idx += pstep
end for
return True
ENDFUNCTION
inPolygon Function : Checks if scan point is within 2D polygon
This function uses ray casting to check if the point is within the polygon. Refer to the last C code block (by Randolph Franklin) in Solution 1
FUNCTION inPolygon(point)
#Flags to indicate if each point coordinate is within the defined polygon limits
in_polygon = False
poly_pts = polygon_.points #polygon_.points is the points of the 2d polygon
j = poly_pts.size() - 1
#Iterate through each polygon point
for each i in range (0, poly_pts.size())
pt_i = poly_pts[i]
pt_j = poly_pts[j]
#flag_a is TRUE if and ONLY if the y coordinate of the scan point is between pt_i.y and pt_j.y
flag_a = (pt_i.y > point.y) != (pt_j.y > point.y)
#Assume we extend a horizontal ray in the positive x direction.
#flag_B is TRUE if and ONLY if the x intersect of the ray is to the right of the scan point
flag_b = point.x < (pt_j.x - pt_i.x) * (point.y - pt_i.y) / (pt_j.y - pt_i.y) + pt_i.x
if flag_a AND flag_b
in_polygon = not in_polygon
end if
j = i
i++
end for
return in_polygon
ENDFUNCTION
LaserScanMaskFilter
Removes scan points by specifying their indexes.
Use Cases
Parameters
- name: mask_filter
type: laser_filters/LaserScanMaskFilter
params:
masks:
<laser1_frameid>:
- 100
- 101
- 102
- 103
- 104
- 1000
- 1001
- 1002
<laser1_frameid>:
- [200, 201, 203]
- ...
Pseudocode
Update Function
FUNCTION Update(scan)
mask = masks["laser_frameid"]
for idx in mask
if idx > idx_array.length:
CONTINUE
end if
scan.ranges[idx] = NaN
end for
It would be nice to be able to state a range, rather than having to explicitly write each index.
ScanShadowsFilter
Background: “Laser scans sometimes hit objects at a grazing angle, resulting in “split pixels” or “shadows”. These laser hits show up in the scan as single points in the middle of space, part-way between the object they grazed and a background object. For many tasks such as object model fitting, these points are simply noise and should be removed using the scan shadows filter. [2]
https://answers.ros.org/question/239454/whats-the-rational-behind-laser_filtersscanshadowsfilter/
Use Case
Parameters
Example config parameters taken from here
- name: shadows
type: laser_filters/ScanShadowsFilter
params:
min_angle: 10 # Minimum perpendicular angle (Value range: 0 to 90 degrees)
max_angle: 170 # Maximum perpendicular angle (Value range: 90 to 180 degrees)
neighbors: 1 # No. of neighbouring points to remove
window: 1 # Window of measurements to check
Pseudocode
Update Function
FUNCTION Update(scan)
for each i in RANGE (0, scan.size()) # For each point in laser scan
for y in RANGE( -config.WINDOW, config.WINDOW)
if (y == 0)
CONTINUE
end if
#Here we take 2 lidar rays within a window and calculate the angle formed
#by the intersection of ray A to ray B and the lidar to ray A,
#Please refer to the visual explaination below
range_a = scan.ranges[i]
range_b = scan.ranges[i + y]
#In the source code, the cos/sin of an angle between 2 rays
#is actually pre-calculated and stored in a look-up table
angle = getAngleBetween(scan.ranges[i], scan.ranges[i + y])
sin_alpha = sin(angle)
cos_alpha = cos(angle)
#Check if ray a is a shadow point
if isShadow(range_a, range_b, sin_alpha, cos_alpha)
for index in RANGE (i - config.NEIGHBOURS, i + config.NEIGHBOURS) #For each neighbouring point
if scan.ranges[i] < scan.ranges[index]
scan[index] = NaN
end if
end for
if remove_shadow_start_point_
scan[i] = NaN
end if
end if
end for
end for
ENDFUNCTION
isShadow Function
# range_a and range_b are the absolute scan distances of P1 and P2 respectively
FUNCTION isShadow(range_a, range_b, sin_alpha, cos_alpha)
perpendicular_y = range_b * sin_alpha
perpendicular_x = range_a - range_b * cos_alpha
#Calculate the angle formed by the intersection of ray A to ray B and the lidar to ray A,
#Please refer to the visual explaination below
perpendicular_tan = ABS(perpendicular_y) / perpendicular_x
#If this angle is not within user-defined range,
# then it is a "shadow" point
if (perpendicular_tan > 0)
if (perpendicular_tan < tan(config.MIN_ANGLE))
return True
end if
else
if (perpendicular_tan > tan(config.MAX_ANGLE))
return True
end if
end if
return False
ENDFUNCTION
Visual Explaination
We would like to obtain the angle THETA, which is formed by the intersection of scan point A to B and the lidar to scan point A. The angle THETA provides us with information about how relatively far apart are the 2 objects (A and B) seen by the lidar. The calculations to get there is shown below:
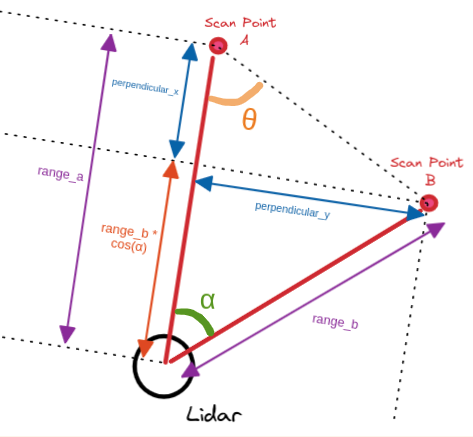
Figure X: Shadow Filter Visual Explaination



ScanBlobFilter
The scan blob filter is useful for extracting “blob objects” which means that racks, human legs can be detected effectively (at close distances). The minimum points and maximum radius must be tuned so that we only obtain blobs of our desired objects and exclude others. For example, you want to only extract chair legs and not human legs, you would specify a smaller max_radius and smaller min_points.
Important Note : This filter is used after the ScanShadowsFilter, as it assumes that each blob would be separated by invalid scan data (Either NaN or Negative range value)
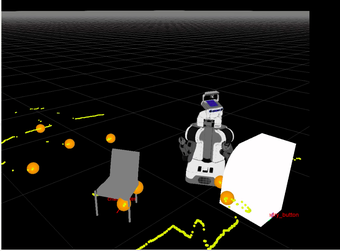
__Figure X: Scan Blob Visualization __
Parameters
- name: blob_filter
type: laser_filters/ScanBlobFilter
params:
max_radius: 0.25 # maximum radius to be considered as blob object
min_points: 4 # min scan points to be considered as blob object
Pseudocode
Update Function
FUNCTION Update(scan_in, scan_out)
scan_out = scan_in #Copy input scans to output scans
std::set<int> indices_to_publish #The scan indices that will represent the blobs, std::set guarantees that each index is unique i.e. no duplicate indices
range_blob = [] #A blob: an array of scan indexes representing 1 blob
range_blobs = [[]] #An array of blobs
#Iterate through the laser scan points
for each i in range(0, scan_in.ranges.size())
#First, set all ranges to invalid (negative values)
scan_out.ranges[i] = -1.0 * fabs(scan_in.ranges[i])
#The moment an invalid range data is encountered,
#If the number of scan points in the blob > user-defined minimum points
#defined by user, then add the blob to range_blobs array
if scan_in.ranges[i] < 0 || isNaN(scan_in.ranges[i])
if range_blob.size() > config.min_points
range_blobs.push_back(range_blob)
end if
range_blob.clear()
else
range_blob.push_back(i)
end if
end for
#This is meant to add the last blob that ended at the
#start/end of the scan range
if range_blob.size() > config.min_points
range_blobs.push_back(range_blob)
end if
#Calculate the centroid and radius of each blob
for each i in range(0, range_blobs.size())
blob_size = range_blobs[i].size()
#Get the centroid of the blob
center_x = 0, center_y = 0
#Iterate through the scan indexes in each blob
for each j in range(blob_size)
scan_index = range_blobs[i][j]
current_range_x = scan_in.ranges[scan_index]
current_range_y = scan_in.ranges[scan_index] * scan_in.angle_increment
center_x += current_range_x
center_y += current_range_y
end for
#Get the centroid by taking the average position of all the scan points within the blob
center_x = center_x / size
center_y = center_y / size
#Check the range of the blob
blob_radius = 0
for each j in range(blob_size)
scan_index = range_blobs[i][j]
current_range_x = scan_in.ranges[scan_index]
current_range_y = scan_in.ranges[scan_index] * scan_in.angle_increment
#Set the blob_radius as the maximum distance between all the points to the blob centroid
if blob_radius < fabs(center_x - x)
blob_radius = fabs(center_x - x)
end if
if blob_radius < fabs(center_y - y)
blob_radius = fabs(center_y - y)
end if
end for
# If blob radius is within maximum radius limit, then
# add the middle scan index of the blob to the accepted scan indices to publish
if blob_radius < config.max_radius
indices_to_publish.insert(range_blobs[i][0] + blob_size/2)
end if
end for
#Iterate through the accepted scan indices to publish
#And set each scan index to valid (positive value)
for each i in indices_to_publish
scan_out.ranges[i] = fabs(scan_in.ranges[i])
end for
return True
ENDFUNCTION
LaserScanSpeckleFilter
This filter removes speckle points in a laser scan by comparing neighboring points. The term speckle refers to a random granular pattern which can be observed e.g. when a highly coherent light beam (e.g. from a laser) is diffusely reflected at a surface with a complicated (rough) structure, such as a piece of paper, white paint, a display screen, or a metallic surface.
Parameters
- name: speckle_filter
type: laser_filters/LaserScanSpeckleFilter
params:
# Select which filter type to use.
# 0: Range based filtering (distance between consecutive points)
# 1: Euclidean filtering based on radius outlier search
filter_type: 0
# Only ranges smaller than this range are taken into account
max_range: 2.0
# filter_type[0] (Distance): max distance between consecutive points
# filter_type[1] (RadiusOutlier): max distance between points
max_range_difference: 0.1
# filter_type[0] (Distance): Number of consecutive ranges that will be tested for max_distance
# filter_type[1] (RadiusOutlier): Minimum number of neighbors
filter_window: 2
Pseudocode
Update Function
FUNCTION Update(scan_in, scan_out)
scan_out = scan_in #Copy input scans to output scans
#Check if range size is big enough to use the filter window
if scan_out.size() <= config.filter_window + 1
return False
end if
i = 0
i_max = scan_in.size()
valid_ranges.clear()
#Iterate through each scan index
while i < i_max
window_valid = checkWindowValid(scan_out, i, config.filter_window, config.max_range_difference)
#Make valid the scan indices within window about scan index i
if window_valid
j = i
j_max = i + config.filter_window
while (j < j_max)
valid_ranges[j++] = true
end while
end if
i++
end while
#Set all scan indices inside valid_ranges array to be valid
#And the rest to be invalid
i = 0
i_max = valid_ranges.size()
while i < i_max
if not valid_ranges[i]
scan_out.ranges[i] = NaN
end if
end while
return True
end FUNCTION
checkWindowValid Function (Distance)
FUNCTION checkWindowsValid(scan, idx, window, max_distance)
num_neighbours = 0 #Neighbours of the current scan index idx
r1 = scan.ranges[idx]
r2 = 0
#Iterate through all the scan indexes about the window of the
#current scan index idx.
#We start from the scan index (idx-window) to (idx+window) inclusive
y = -window
while y < window + 1 && num_neighbours < window
j = idx + y
r2 = scan.ranges[j]
#If scan index j is out of bounds or is the current scan index pr is infinity
if (j < 0 or j >= scan.ranges.size() or idx == j or r2 is NaN )
continue
end if
d = sqrt( r1**2 + r2**2 - (2 * r1 * r2 * cosf(y * scan.angle_increment))
if d <= max_distance
num_neighbours++
end if
y++
end while
if num_neighbours < window
return False
else
return True
end if
end FUNCTION
checkWindowValid Function (Radius outlier)
FUNCTION checkWindowsValid(scan, idx, window, max_distance)
end FUNCTION
pass_through filter
There is no documentation available nor does they seem to be an implementation of it in the source code, save for an empty example in “examples/pass_through_example.xml”
Afterthoughts
Going through the source code of each laser filter has imbued me a renewed appreciation of laser_filter’s simplicity yet some of the filters have led me to questioned if such implementation can be improved in it’s efficiency. Yes there are several error checking mechanisms built into each laser scan but I believe that these checks could have been done at the initialization stage (after waiting for the first laser scan message to arrive), and need not be repeated at each update step, given that the laser scan meta-data is highly unlikely to change during run time. Furthermore, some of the filters could benefit from the use of dynamic reconfigure. And perhaps the ability to turn on/off certain laser filters within the laser filter chain would also be extremely useful for actions such as docking.